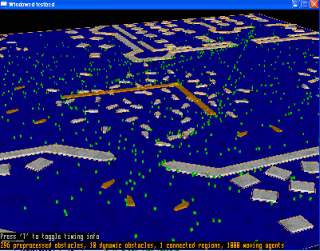
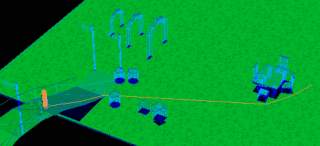
| PathEngine SDK – это мощная библиотека (набор инструментов), предназначенная для поиска пути и определения коллизий. Технологии данной библиотеки являются на сегодняшний день новаторскими. В основе SDK лежит четкая модель движения, с поиском столкновений, выбирая более рациональный путь. Дополнительные инструменты также имеют хорошую функциональность, в том числе для тестирования и проверки решений. PathEngine имеет практически все необходимые особенности, в том числе: анализ 2Д перекрытия в 3Д процесс (значительное уменьшение использования времени и памяти для открытых сцен), улучшения линковки, опции контроля исключений для результатов земли, поддержка загрузки снепшотов, и т.д. Библиотека пользуется популярностью, в том числе лицензировалась и многими российскими разработчиками для использования в своих игровых проектах. Движок коммерческий: 4500 евро – подписка на 3 месяца (за бинарную версию), 8500 евро – 6 месяцев, 13000 евро – 1 год. При этом у более дешевых версий будут урезаны некоторые функции, возможности и сервис. Также расценка будет зависеть от платформы: может быть только на PC, только на Xbox 360 или PC + Xbox 360. Это профессиональная высокотехнологичная библиотека, поэтому цены соответствующие. Для студентов и тестеров имеются бесплатные специальные версии для ознакомления (исходный текст также предоставляется), которые можно скачать с официального сайта. Официальный сайт: http://pathengine.com
PathEngine's sophisticated points-of-visibility core means: A powerful and well-defined motion space description (essentially: augmented navigation meshes for ground management + static and dynamic obstacle detail + automatic expansion by pathfinding agent shape). Paired pathfinding and collision, for efficient and effective reactive behaviours and fundamentally robust movement planning. Students and hobbyists are invited to try out the 'testbed-only' version of the SDK, which can be found on the downloads page. Source code for the demo is also provided. This is a great way, then, to get started learning about implementing intelligent agent movement. | 

 8
8




